| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- 모던 자바스크립트 튜토리얼
- 토이 프로젝트
- 회고
- REACT
- 시뮬레이션
- HTML5
- 자료 구조
- react-three/fiber
- js
- JavaScript
- 수학
- 브루트포스
- 세그먼트 트리
- 기본 문법
- Next.js
- State
- three.js
- 자바스크립트
- poiemaweb
- styled-components
- 프론트엔드
- 자바
- 해시를 사용한 집합과 맵
- 엔트리포인트
- 구현
- 개발 회고
- 티스토리챌린지
- 백준
- 오블완
- 코딩일기
- Today
- Total
코딩하는 고릴라
[Javascript] BOJ_20055. 컨베이어 벨트 위의 로봇 본문
🦍 문제
20055번: 컨베이어 벨트 위의 로봇
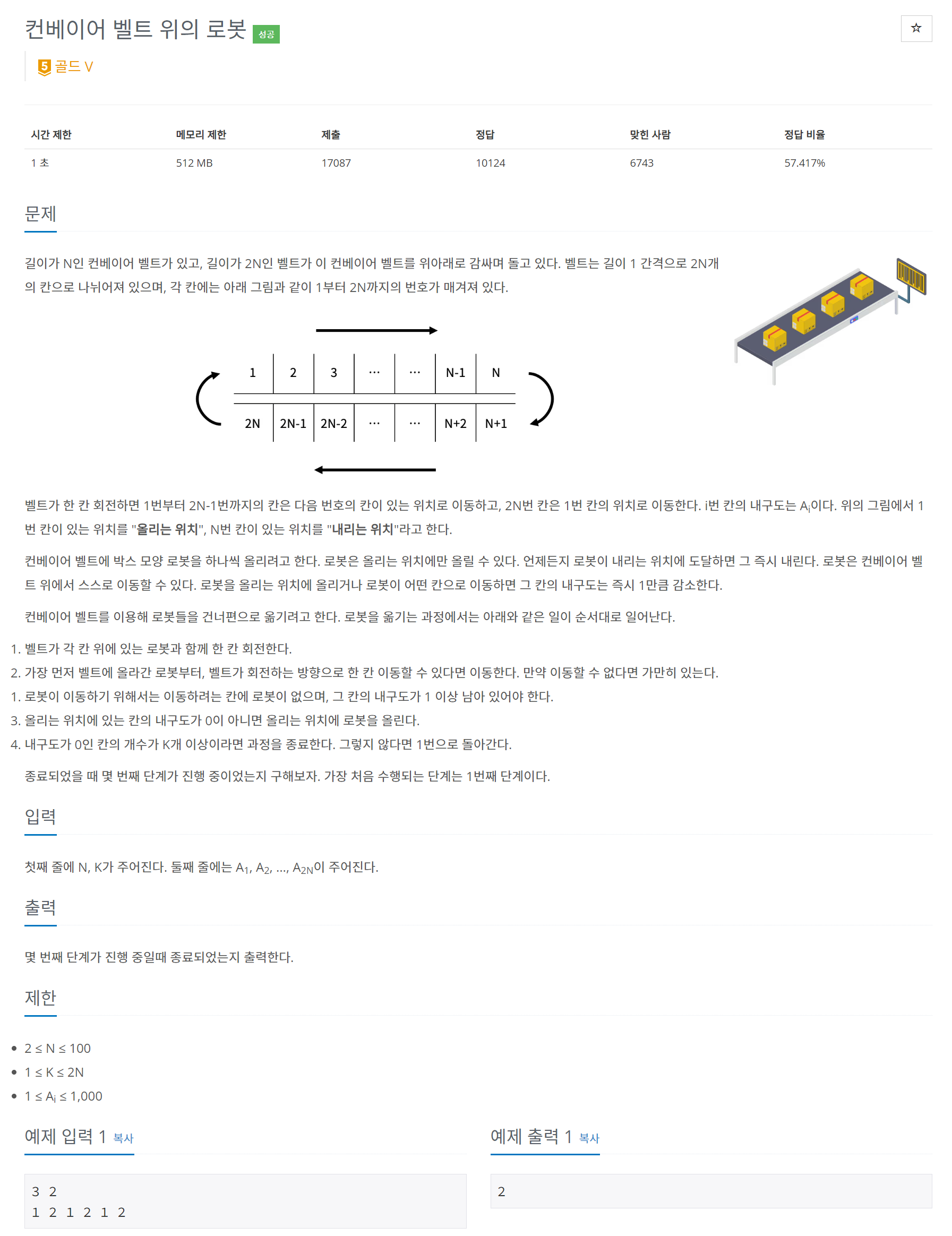
길이가 N인 컨베이어 벨트가 있고, 길이가 2N인 벨트가 이 컨베이어 벨트를 위아래로 감싸며 돌고 있다. 벨트는 길이 1 간격으로 2N개의 칸으로 나뉘어져 있으며, 각 칸에는 아래 그림과 같이 1부
www.acmicpc.net
🐈 문제 풀이
1. 무엇을 구해야 할까?
- 컨베이어의 회전, 로봇의 이동, 로봇을 컨베이어 위에 올리는 작업을 한 단계로 하여 몇 단계를 거쳐야 컨베이어 벨트 중에서 내구도가 0인 칸의 개수가 K개 이상이 되는지를 구해야 한다.
2. 어떻게 구해야 할까?
- 컨베이어 벨트의 상태를 구현한 후, 해당 상태를 조작하는 여러 함수들을 작성해 구할 수 있다.
- Conveyor라는 클래스를 선언한 후, 내부에서 상태와 함수들을 작성하였다.
2.1. 컨베이어 벨트의 상태
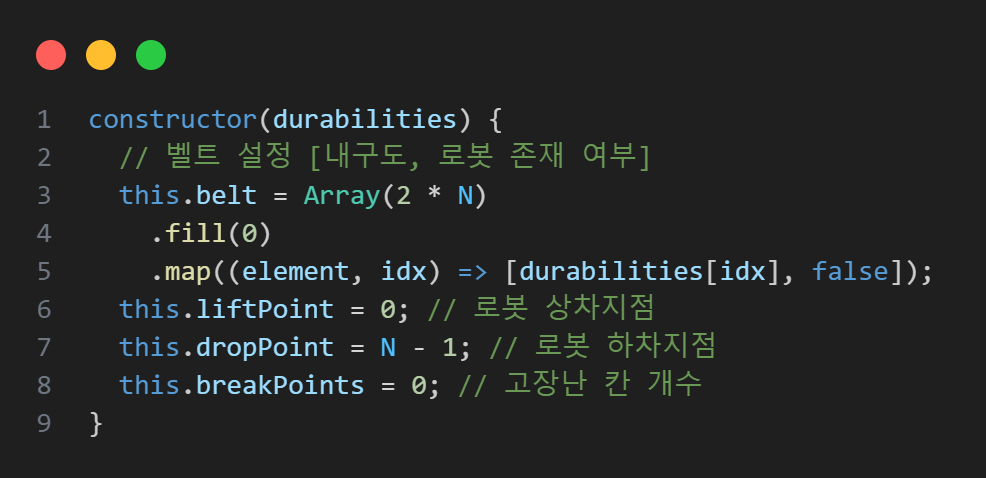
- belt : 크기가 2 * N인 배열. 배열의 각 칸에 [해당 칸의 내구도, 해당 칸의 로봇 존재 여부] 로 상태를 저장
- liftPoint : 로봇을 올리는 지점
- dropPoint : 로봇을 하차하는 지점
- 컨베이어 벨트 회전을 배열 내 값의 물리적 이동이 아닌 논리적 이동을 통해 구현할 때 사용
2.2. 로봇 상차
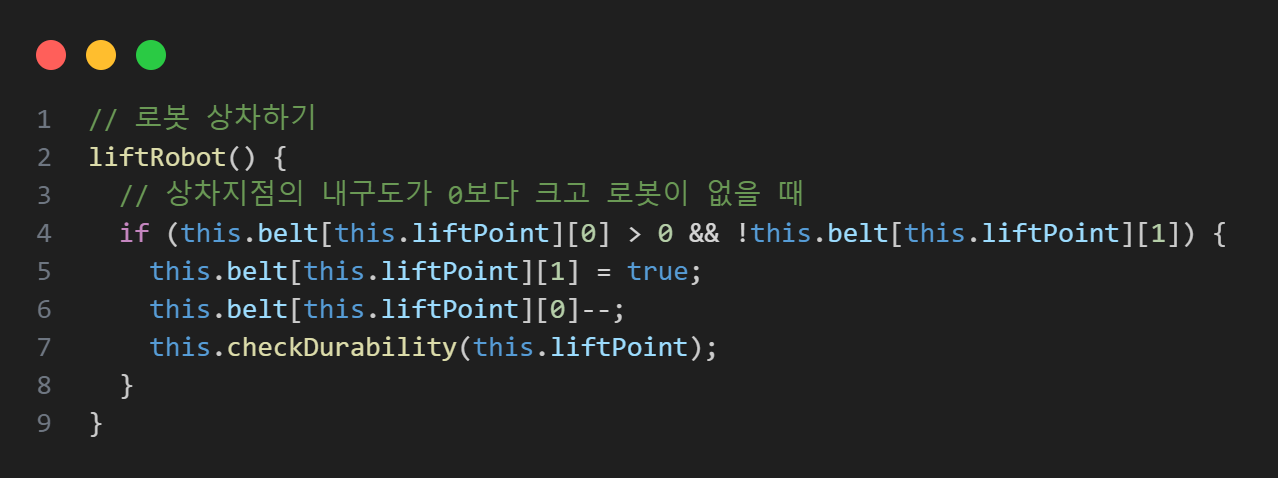
- 상차 지점의 내구도, 로봇 존재 여부를 고려하여 로봇 상차
- 로봇 상차 후 내구도 체크를 통해 벨트 내구도가 0인지 아닌지 체크
2.3. 로봇 하차
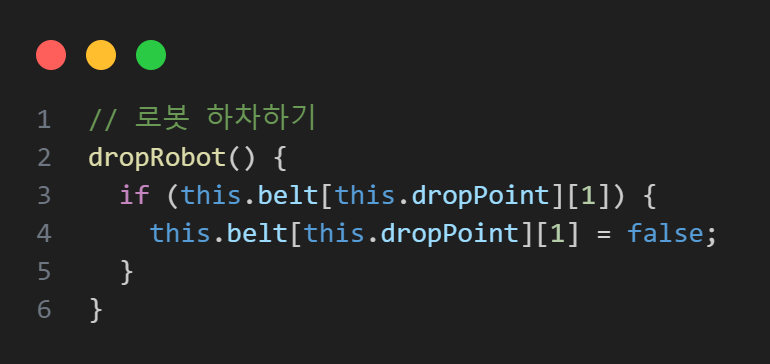
- 하차 지점에 로봇이 존재하면 로봇 하차
2.4. 내구도 체크
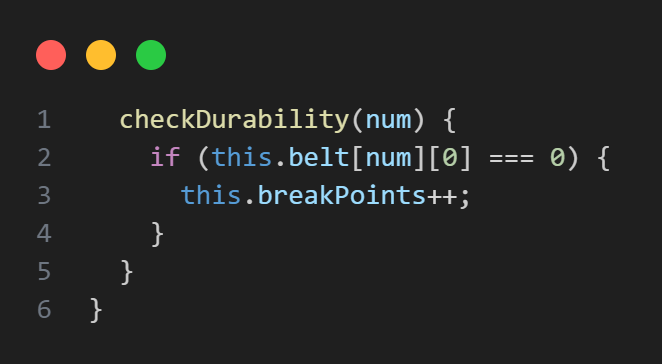
- 입력받은 지점의 내구도가 0인 경우 breakPoints 변수 1 증가
2.5. 벨트 회전
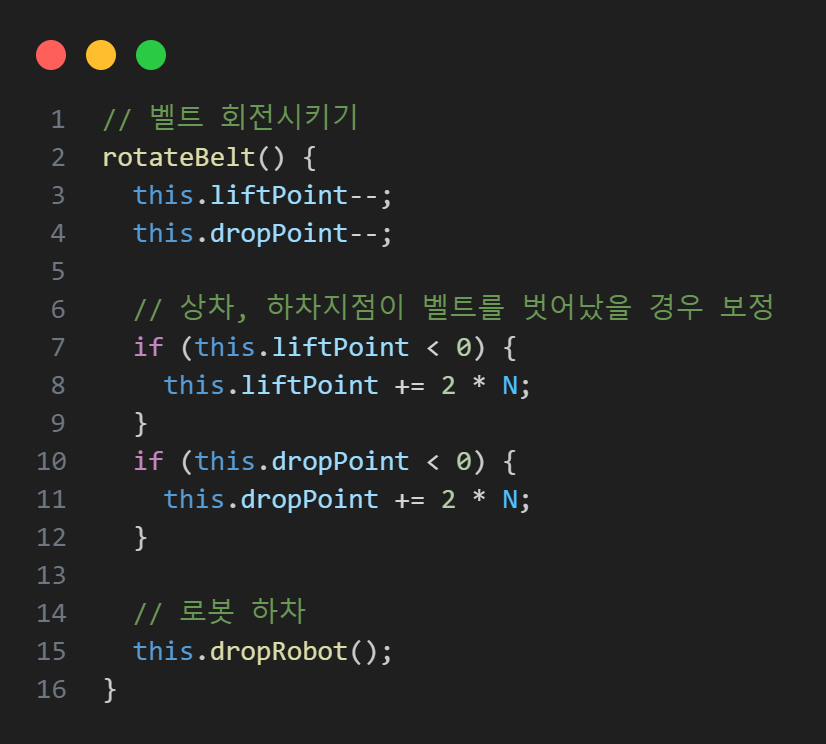
- liftPoint, dropPoint 변수 값만을 변경해 벨트의 회전을 구현
- 벨트 회전 후 로봇 하차
2.6. 로봇 이동
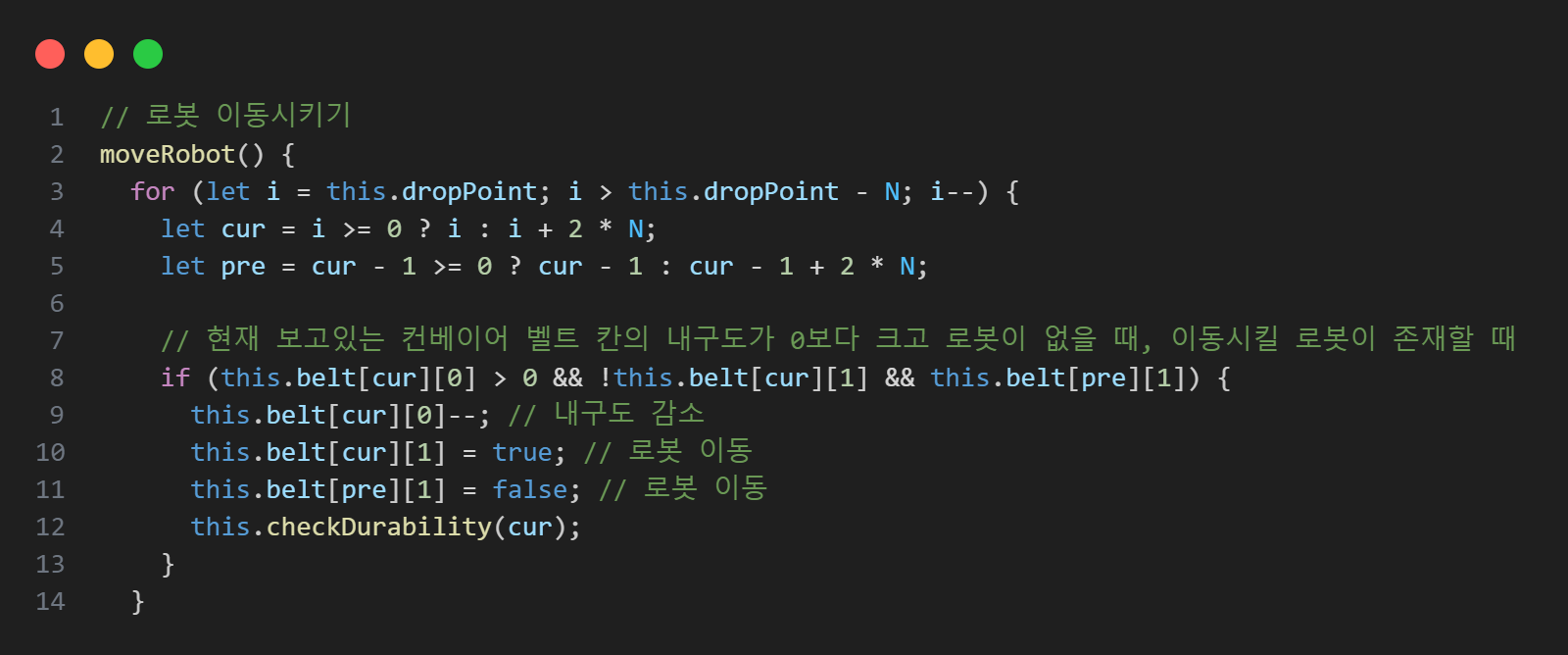
- dropPoint에서부터 거꾸로하여 liftPoint까지 로봇을 한 칸씩 앞으로 이동
- 로봇의 존재 여부, 벨트의 내구도를 고려하여 조건문 작성
- 로봇 이동 후 내구도 체크 진행
3. 특별히 고려해야 할 사항은?
- 벨트의 상태를 어떤 식으로 구조화 할지, 해당 상태를 어떤 식으로 조작해 기능을 구현할 지 생각해보면 좋을 것 같다.
🐕🦺 소스 코드
//초기 설정
const input = require("fs")
.readFileSync("/dev/stdin")
.toString()
.trim()
.split("\n");
const [N, K] = input[0].split(" ").map(Number);
class Conveyor {
constructor(durabilities) {
// 벨트 설정 [내구도, 로봇 존재 여부]
this.belt = Array(2 * N)
.fill(0)
.map((element, idx) => [durabilities[idx], false]);
this.liftPoint = 0; // 로봇 상차지점
this.dropPoint = N - 1; // 로봇 하차지점
this.breakPoints = 0; // 고장난 칸 개수
}
// 벨트 회전시키기
rotateBelt() {
this.liftPoint--;
this.dropPoint--;
// 상차, 하차지점이 벨트를 벗어났을 경우 보정
if (this.liftPoint < 0) {
this.liftPoint += 2 * N;
}
if (this.dropPoint < 0) {
this.dropPoint += 2 * N;
}
// 로봇 하차
this.dropRobot();
}
// 로봇 상차하기
liftRobot() {
// 상차지점의 내구도가 0보다 크고 로봇이 없을 때
if (this.belt[this.liftPoint][0] > 0 && !this.belt[this.liftPoint][1]) {
this.belt[this.liftPoint][1] = true;
this.belt[this.liftPoint][0]--;
this.checkDurability(this.liftPoint);
}
}
// 로봇 하차하기
dropRobot() {
if (this.belt[this.dropPoint][1]) {
this.belt[this.dropPoint][1] = false;
}
}
// 로봇 이동시키기
moveRobot() {
for (let i = this.dropPoint; i > this.dropPoint - N; i--) {
let cur = i >= 0 ? i : i + 2 * N;
let pre = cur - 1 >= 0 ? cur - 1 : cur - 1 + 2 * N;
// 현재 보고있는 컨베이어 벨트 칸의 내구도가 0보다 크고 로봇이 없을 때, 이동시킬 로봇이 존재할 때
if (this.belt[cur][0] > 0 && !this.belt[cur][1] && this.belt[pre][1]) {
this.belt[cur][0]--; // 내구도 감소
this.belt[cur][1] = true; // 로봇 이동
this.belt[pre][1] = false; // 로봇 이동
this.checkDurability(cur);
}
}
this.dropRobot();
}
checkDurability(num) {
if (this.belt[num][0] === 0) {
this.breakPoints++;
}
}
}
(function solution() {
const conveyor = new Conveyor(input[1].split(" ").map(Number));
let i = 0;
while (conveyor.breakPoints < K) {
conveyor.rotateBelt();
conveyor.moveRobot();
conveyor.liftRobot();
++i;
}
console.log(i);
})();
🐖 Think
- 상태 설정과 이를 조작하는데 있어 큰 어려움은 없었던 문제였다.
'APS' 카테고리의 다른 글
| [Javascript] Algospot_JUMPGAME. 외발뛰기 (2) | 2024.10.04 |
|---|---|
| [Java] BOJ_1541. 잃어버린 괄호 (0) | 2024.02.11 |
| [Javascript] BOJ_14500. 테트로미노 (0) | 2023.12.18 |
| [Javascript] BOJ_17144. 미세먼지 안녕! (0) | 2023.12.18 |
| [Javascript] BOJ_4673. 셀프 넘버 (2) | 2023.11.25 |



